SmartPol Status 2022-2023
The proposed project involves the development of a modern concept involving artificial intelligence, real-time monitoring of pollutants using IoT platforms and later data processing.
SMARTPOL’s functional components
Interactive Software (ISW) is responsible for defining the technical aspects involved in the collection of pollution data at the USV level and their transmission to the command and coordination center level. Within the command and coordination center, ISW delivers a USV monitoring and remote control application.
Activities undertaken by ISW in 2022 targeted the aspects assumed by the project, within stage 1, respectively, starting from the concrete aspects that currently govern pollution monitoring operations in marine areas. From the very wide spectrum of actions specific to pollution monitoring, the SMARTPOL team focuses on a quick procedure involving preventive steps, collecting data in real time and post-processing collected data.
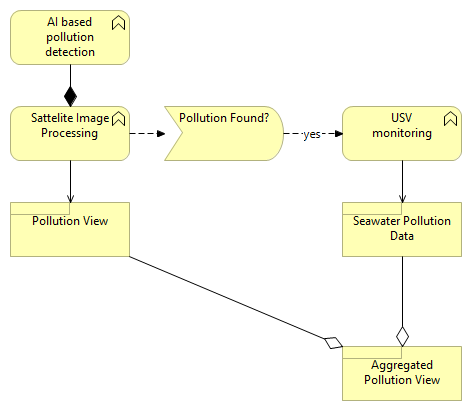
SMARTPOL’s general working procedure
Procedurally, the detection will be largely achieved through the analysis of satellite images – images and satellite and AIS (Automated Identification Systems) data from maritime vessels. In the case of the detection of potential areas of contamination with pollutants, the drone from the project will be used to confirm the situations, which will contain pollution measurement capabilities at the level of the vessel.
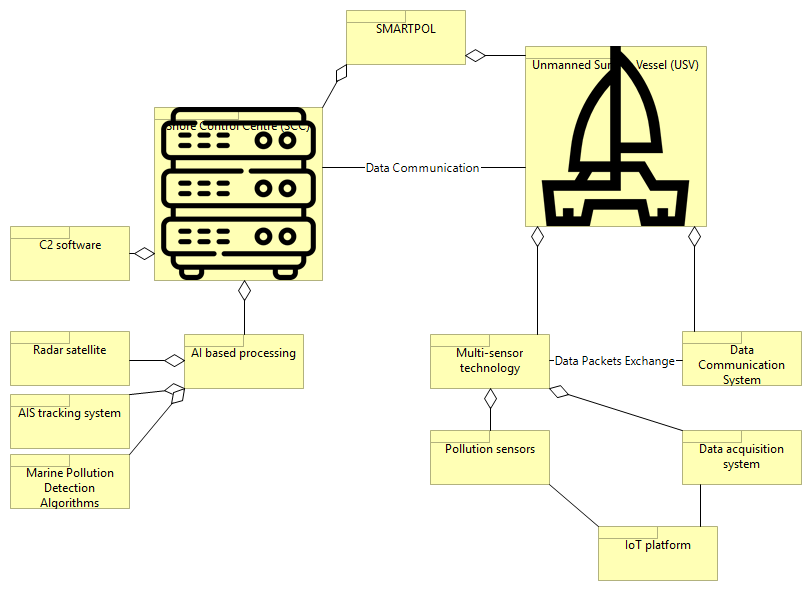
From the initial analysis regarding the functional block diagram of the SMARTPOL system, ISW investigated the elements for which it is directly responsible, namely the data acquisition components, data transmission and their integration into the architectural component for the pilot system. As part of the project, ISW also delivers the command and control component of the USV system. The items in the ISW competency are “C2 software”, “Data Communication System” and “Data Acquisition System”.
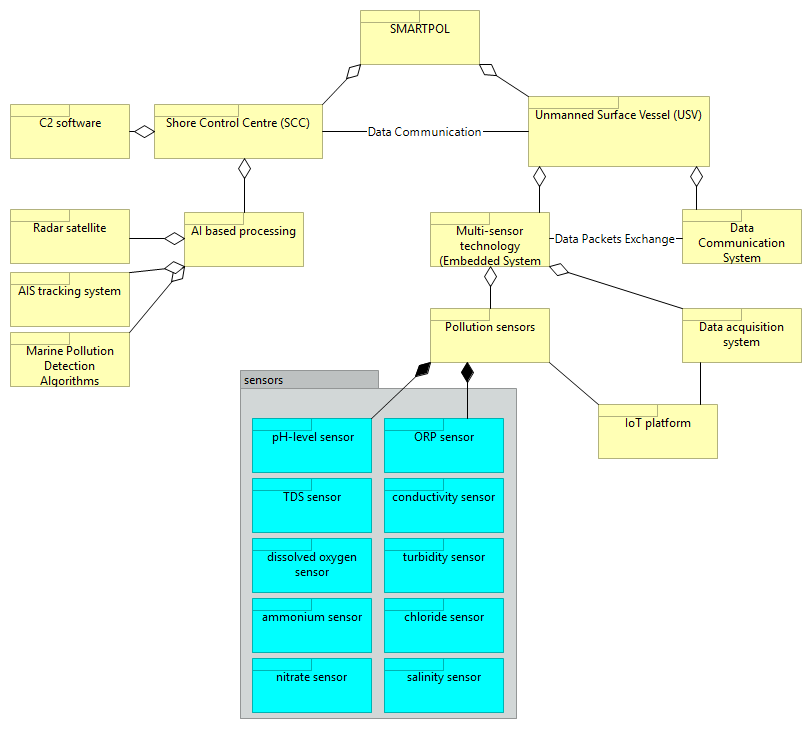
Excerpt from the detailed functional diagram and representation of coordinated elements by ISW
The IoT module related to the USV (Unmanned Surface Vehicle)/drone platform’s pollution detection capability, a set of hardware and software equipment for sensor integration, data acquisition and their transmission through the communications module to the command center will be a standardized module that it will be able to be applied in the case of pilot sites when tests will be carried out to validate the concepts of performance, efficiency in pollution detection, respectively in the sites in Turkey, Malta and South Africa.
The IoT module will incorporate standardized and uniform mechanisms for the identified use cases, but also for similar situations regarding pollution monitoring, both from the hardware and software design perspective, by applying open data structures, that could be integrated and supported by open technologies for retrieval, their processing and processing, including API functions and software libraries.
In 2022 and 2023, the result indicators obtained following the implementation period are centered on the development of usage scenarios and technical requirements, the design of the system architecture and the development of functional models for the SmartPol system, respectively the construction of experimental modules for IoT, the integration of several water monitoring sensors, acquisition and development boards for data processing, data storage and data visualization capabilities. These activities are part of the stages regarding the realization of the autonomous control system and the communication system.
The first experimental trials for the data acquisition and processing platform used Arduino technology, both for the processing part and compatible sensors. Prototypes were made using several variants of Arduino processing modules, namely Arduino UNO R3 and Arduino Wireless. The sensors chosen for the tests were liquid temperature and turbidity sensors. The tested communication was Wireless, and later Lora modules were also purchased, for the implementation of communication at greater distances, on the technology mentioned in the project.
Software development for data acquisition, encapsulation into open data structures and storage was implemented using C programming languages, making use of Arduino standard libraries and Arduino and Firebase (Google) cloud services for squaring the acquired data.
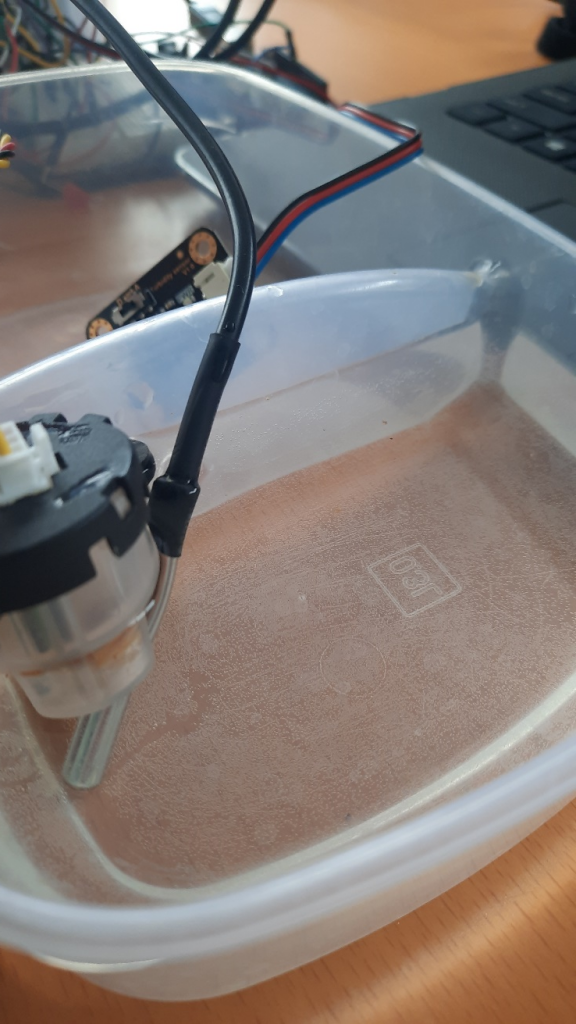
Demonstration setup (temperature-turbidity) on Arduino acquisition system
Following the stabilization of the architectural elements, the approved professional products for the realization of the data acquisition subsystem have been purchased or will be received.
The first internal experimental tests for the communication system used WiFi technology and access to the Arduino cloud and Firebase cloud database services. The remote communication elements between the USV component and the data center is addressed in Lora technology as per the scheme below.
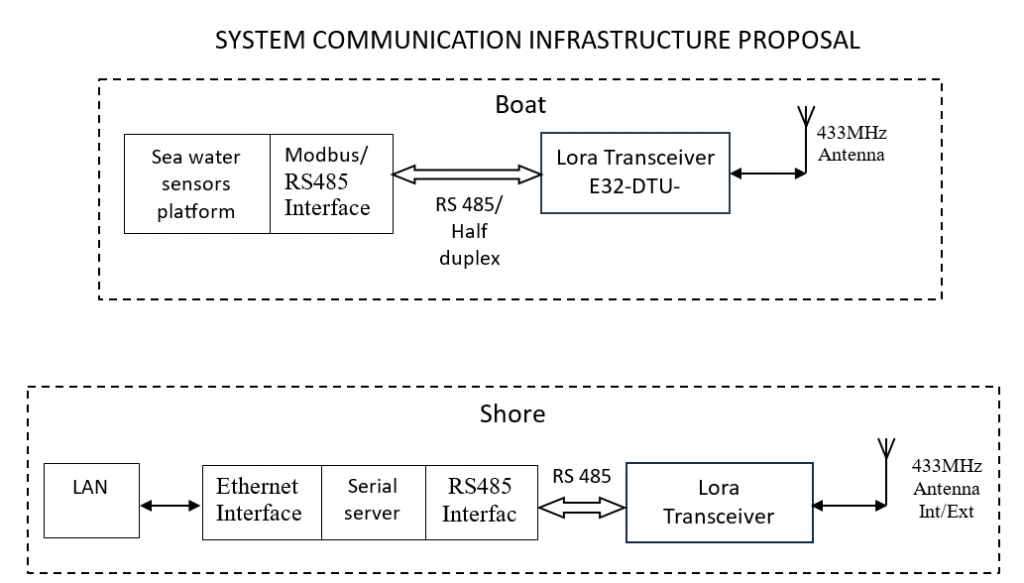
Proposal infrastructure communications system
The equipment has been purchased and development continues according to the agreed architecture elements.

Development Setup: Laboratory (left) equipment and Lora (right) commercial equipment
Connectivity and remote transmission tests were performed for data packets using Lora infrastructure.

Lora gateway for the control center (equipment that can be installed outside)
The possibility of remotely sending video streams and/or images using the Lora infrastructure was also investigated. Performance is very low (10sec) for small size images (QVGA), so this approach has been abandoned.
The Lora infrastructure will be used to transmit GPS coordinates and commands to the USV, according to the agreed system requirements. The USV will use the Lora infrastructure for remote control as a secondary (backup) mechanism.
The SMARTPOL project was presented at the MarTERA autumn conference from October 25-27, 2022, a meeting place between representatives of international coordinators, government funding agencies, members of project consortia and beneficiaries of the results of programs financed by the ERA-NET program.
In 2023, in Istanbul, on September 22-23, the SmartPol coordination consortium met, where the progress achieved by each partner in the project and the common challenges to achieve the integrated objectives were presented.